테슬라의 자율주행관련 기술개발 역사
테슬라는 아주 오래전부터 자율주행 관련 기술을 개발해 온 것으로 알려져있다. 단순히 Chat GPT에만 물어봐도 굉장히 빠르게 답변을 얻을 수 있다. Chat GPT로부터 얻은 답변을 확인해보자.
1) 2014년: Autopilot 1.0 발표. 카메라, 초음파 센서, 레이더 등을 사용한 운전자 보조 시스템 도입.
2) 2016년: Autopilot 2.0 하드웨어 도입. 자율주행을 위한 8개의 카메라와 강화된 센서 시스템을 갖춘 새로운 플랫폼.
3) 2019년: 테슬라는 자율주행 컴퓨터(FSD 컴퓨터)를 발표하며, 기존 Autopilot 시스템을 기반으로 완전 자율주행(FSD, Full Self-Driving) 개발을 가속화.
4) 2020년: FSD 베타 테스트 시작. 제한된 사용자들에게 새로운 자율주행 소프트웨어를 제공해 실도로 테스트.
5) 현재: 테슬라는 지속적으로 FSD 기능을 업데이트하며, 완전 자율주행에 가까운 기술을 상용화하기 위해 노력 중.
기술개발과는 별개로 자율주행관련 특허는 언제부터 본격적으로 출원되는지 확인해보자.
테슬라의 자율주행관련 특허 소개
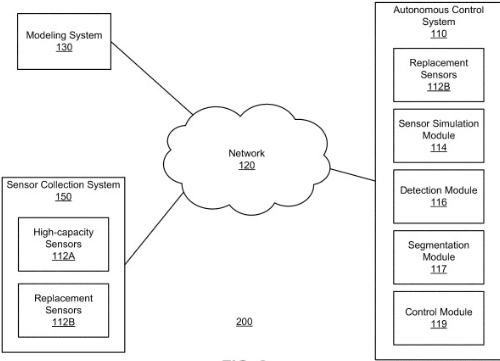
자율주행관련특허들은 2018년 이후에 본격적으로 출원되고 있는 것으로 나타난다. 그 전인 2017년에 'Multi-channel sensor simulation for autonomous control systems'으로 출원된 특허가 있는데 테슬라의 자율주행 최초의 특허는 아니나 초창기 특허에 해당한다. 기술 내용을 살펴보자. 먼저 내용을 개략적으로 알아보면,
요약 - 특허가 어떤 내용을 담고 있는지 개략적으로 표현
"자율주행 제어시스템에 관한 기술로서 다수의 고용량 센서들로부터의 데이터를 결합하고 결합된 데이터를 시뮬레이션하며, 위 센서 데이터는 자율 안내를 위해 차량을 에워싸고 있는 물리적 환경 정보를 포함하여 구성된다. 즉 센서 데이터는 주변 환경의 장면, 차량의 지리적 위치 등을 시각적으로 캡처하는 이미지의 형태도 가능하다. 위 고용량 센서 데이터는 하나 이상의 신경망 모델을 통해 시뮬레이션된다.
청구항 - 특허가 누리고자 하는 권리의 범위(장치, 방법등으로 구성됨)
" 1. A method of controlling a vehicle with objects identified in a real-world environment with simulated sensor data of the real-world environment, comprising:
receiving sensor data generated by a physical set of sensors on the vehicle that sense the environment of the vehicle with a set of sensing characteristics, the sensor data including a first set of measurements with respect to the sensing characteristics of the sensors, the set of sensing characteristics being indicative of low-capacity sensors;
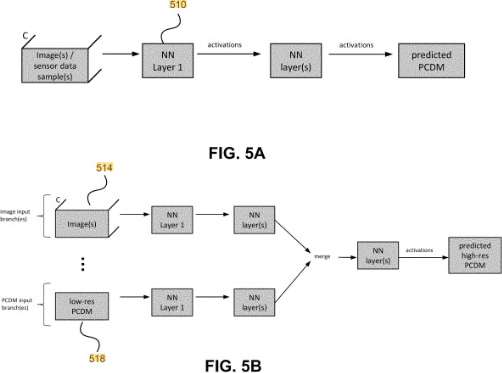
generating simulated sensor data representing a simulated set of sensors on the vehicle having sensing characteristics being indicative of high-capacity sensors and differing from the set of sensing characteristics of the physical set of sensors, wherein generating simulated sensor data comprises:applying a machine-learned model to a synthesized input of the sensor data, wherein an output of the machine-learned model includes the simulated sensor data of high-capacity sensors and wherein the simulated sensor data simulates a second set of measurements with respect to the sensing characteristics of the simulated set of sensors,
wherein the machine-learned model is configured to output simulated sensor data of high-capacity sensors for a real-world environment based on input of corresponding sensor data of low-capacity sensors for the real-world environment, and wherein the machine-learned model was trained from a first set of low-capacity sensors and one or more high capacity sensors positioned on a data collection vehicle;
identifying the objects in the environment by applying a detection model to the simulated sensor data; and
providing guidance on controlling the vehicle based on the identified objects in the simulated sensor data.
'경제 > TESLA' 카테고리의 다른 글
| 자율주행기술(특허) 테슬라 v. 현대기아차 (2) | 2025.01.03 |
|---|---|
| 테슬라의 자율주행 기술개발의 증가 (1) | 2025.01.02 |
| TESLA(테슬라)의 개발기술현황 (4) | 2024.12.24 |
| TESLA(테슬라) 주가와 특허출원과의 연관 관계 (3) | 2024.12.23 |